
- cross-posted to:
- science@beehaw.org
- cross-posted to:
- science@beehaw.org
Abstract
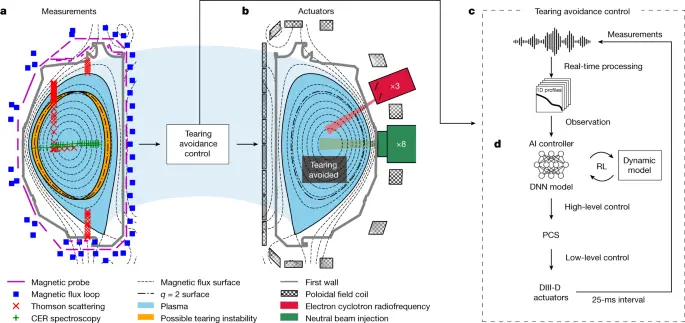
For stable and efficient fusion energy production using a tokamak reactor, it is essential to maintain a high-pressure hydrogenic plasma without plasma disruption. Therefore, it is necessary to actively control the tokamak based on the observed plasma state, to manoeuvre high-pressure plasma while avoiding tearing instability, the leading cause of disruptions. This presents an obstacle-avoidance problem for which artificial intelligence based on reinforcement learning has recently shown remarkable performance. However, the obstacle here, the tearing instability, is difficult to forecast and is highly prone to terminating plasma operations, especially in the ITER baseline scenario. Previously, we developed a multimodal dynamic model that estimates the likelihood of future tearing instability based on signals from multiple diagnostics and actuators. Here we harness this dynamic model as a training environment for reinforcement-learning artificial intelligence, facilitating automated instability prevention. We demonstrate artificial intelligence control to lower the possibility of disruptive tearing instabilities in DIII-D, the largest magnetic fusion facility in the United States. The controller maintained the tearing likelihood under a given threshold, even under relatively unfavourable conditions of low safety factor and low torque. In particular, it allowed the plasma to actively track the stable path within the time-varying operational space while maintaining H-mode performance, which was challenging with traditional preprogrammed control. This controller paves the path to developing stable high-performance operational scenarios for future use in ITER.
You must log in or register to comment.